United Motorsport Haldex software has hundreds of hours of calibration work and custom strategical control. This software is flashed directly into the Haldex control unit, not into the engines ECU; it will work with all engine ECU software and is not transmission specific. The same torque will be transferred whether your vehicle is manual or automatic. Unlike other available controllers It will also work on diesel models. It does not require any external devices to switch mode; this is all taken care of automatically inside our software.
Modes Available:
Performance Mode: When requesting the most performance from your car, our software passes more torque to the rear than ANY other controller. While still retaining drive-ability and keeping with in hardware limits. Performance requested is based on pedal position. The harder you press the pedal, the more torque our software will transfer to the rear.
ECO Mode: While cruising our software decouples any drive to the rear, this creates better fuel economy while cruising. This decreases wear on an expensive non serviceable part. ECO mode is automatically engaged when your car moving along the road at steady speed, the same for throttle position. For Example, if you are driving down the road at a steady 70 mph this will engage ECO mode. At any point, if wheel spin is detected, 4wd will be engaged.
Variable Brake Distribution: While braking the software applies appropriate torque to the rear. This makes the car more stable in a hard braking situation. A MAJOR part of this control is vehicle speed, which prevents any binding of the drive train whilst steering at ANY low speeds (ie trying to park the car). This is also true of left foot braking, unlike stock.
This chart shows how much torque can be transferred to the rear wheels from various versions of software.
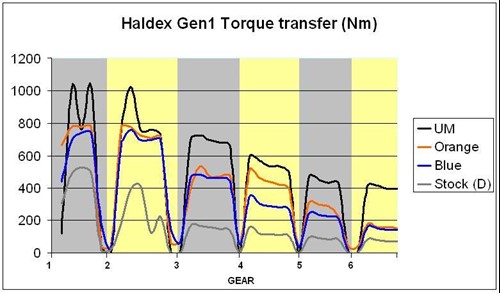
In first gear the peaks on the UM line are created by wheel spin and our software increasing torque transfer. The dip is recovery from wheel spin. Also on entry into 2nd gear, as the clutch grabbed, this caused wheel spin; and again our software reacted to it. From this chart it is also possible to see that other controllers hit a total maximum torque transfer, and as such are unable to react to wheel spin.
*In House Flash Only*